
Giáo án Chuyên đề Tin học 10 Kết nối tri thức Bài 11: Dẫn đường tự động cho robot
Giáo án Chuyên đề Tin học 10 Kết nối tri thức Bài 11: Dẫn đường tự động cho robot
Chỉ từ 200k mua trọn bộ Kế hoạch bài dạy (KHBD) hay Giáo án Chuyên đề Tin học 10 Kết nối tri thức chuẩn kiến thức, trình bày đẹp mắt, dễ dàng chỉnh sửa:
- B1: gửi phí vào tk:
1133836868- CT TNHH DAU TU VA DV GD VIETJACK - Ngân hàng MB (QR) - B2: Nhắn tin tới Zalo VietJack Official - nhấn vào đây để thông báo và nhận giáo án
I. MỤC TIÊU
1. Kiến thức
Sau bài học này, HS sẽ:
- Biết lập trình sử dụng cảm biến dò đường để dẫn đường tự động cho robot.
2. Năng lực
- Năng lực chung:
● Năng lực tự chủ và tự học trong tìm tòi khám phá
● Năng lực giao tiếp và hợp tác trong trình bày, thảo luận và làm việc nhóm
● Năng lực giải quyết vấn đề và sáng tạo trong thực hành, vận dụng.
- Năng lực riêng:
● HS trả lời các câu hỏi của phần củng cố, phần luyện tập và viết chương trình lập trình mở rộng ở phần vận dụng. Trong quá trình thực hiện các yêu cầu, HS được phát triển năng lực giải quyết vấn đề và kĩ năng lập trình cảm biến dò đường.
3. Phẩm chất
- Chăm chỉ tích cực xây dựng bài, có trách nhiệm, chủ động chiếm lĩnh kiến thức theo sự hướng dẫn của GV.
- HS có thái độ tự giác, hợp tác khi thảo luận nội dung bài học.
- HS trung thực hoàn thành đầy đủ các bài tập.
II. THIẾT BỊ DẠY HỌC VÀ HỌC LIỆU
1. Đối với giáo viên
- Sách chuyên đề học tập Định hướng khoa học máy tính 10, SGV, Kế hoạch bài dạy.
- Cảm biến dò đường hoặc hình ảnh minh họa cụ thể phần lí thuyết.
- Lập trình hoàn thiện chương trình kéo thả như ví dụ minh họa trong bài.
- Máy tính, máy chiếu (nếu có).
2. Đối với học sinh: Sách chuyên đề học tập Định hướng khoa học máy tính 10, vở ghi, bút.
III. TIẾN TRÌNH DẠY HỌC
A. HOẠT ĐỘNG KHỞI ĐỘNG
a. Mục tiêu: Gợi ý cho HS biết robot có thể tìm được đường đi bằng cảm biến dò đường.
b. Nội dung: GV đặt câu hỏi rồi chỉ định một số HS trả lời.
c. Sản phẩm học tập: HS trả lời câu hỏi dựa vào hiểu biết của bản thân.
d. Tổ chức thực hiện:
Bước 1: GV chuyển giao nhiệm vụ:
- GV đặt câu hỏi cho HS: Theo em, làm thế nào để robot có thể tự di chuyển đúng đường đi đã vạch sẵn?
Bước 2: HS thực hiện nhiệm vụ học tập: HS chú ý theo dõi, suy nghĩ câu trả lời.
Bước 3: Báo cáo kết quả hoạt động, thảo luận: HS dựa vào hiểu biết của bản thân để đưa ra câu trả lời, HS khác nhận xét bổ sung.
Đáp án: Robot có thể sử dụng cảm biến dò đường để tự tìm được đường đi.
Bước 4: Đánh giá kết quả thực hiện: GV nhận xét câu trả lời của HS, trên cơ sơ đó dẫn dắt vào bài học:
Trong bài học ngày hôm nay, chúng ta sẽ cùng nhau khám phá cách lập trình sử dụng cảm biến dò đường để dẫn đường tự động cho robot –Bài 11: Dẫn đường tự động cho robot.
B. HOẠT ĐỘNG HÌNH THÀNH KIẾN THỨC
Hoạt động 1: Xác định tín hiệu của mắt trong cảm biến dò đường
a. Mục tiêu: Giúp HS biết cách thức điều khiển cảm biến dò đường.
b. Nội dung: GV giải thích nguyên tắc hoạt động của cảm biến dò đường (có sử dụng cảm biến hoặc hình ảnh đã chuẩn bị để minh họa), giải thích ý nghĩa câu lệnh lập trình.
c. Sản phẩm học tập: HS hiểu được nguyên tắc hoạt động, câu lệnh của cảm biến dò đường.
d. Tổ chức hoạt động:
HOẠT ĐỘNG CỦA GIÁO VIÊN - HỌC SINH |
DỰ KIẾN SẢN PHẨM |
|
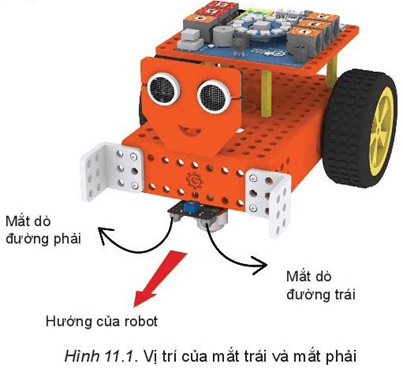
Bước 1: GV chuyển giao nhiệm vụ học tập - GV yêu cầu HS đọc nhiệm vụ Hoạt động 1 SCĐ tr.49: Đọc, thảo luận về nguyên tắc hoạt động và câu lệnh xác định tín hiệu của mắt trong cảm biến dò đường. - GV chiếu hình ảnh minh họa và giới thiệu cho HS biết vị trí của mắt phải và mắt trái của cảm biến dò đường:
- GV yêu cầu HS đọc thông tin mục 1 và cho biết: Em hãy nêu cấu trúc và ý nghĩa câu lệnh xác định tín hiệu của mắt trong cảm biến dò đường. - GV lưu ý cho HS kiến thức về giá trị logic của mắt tín hiệu của cảm biến dò đường: Khi ở trong vùng màu tối, giá trị lôgic trả về là 0 và trong vùng màu sáng, giá trị lôgic trả về là 1. Bước 2: HS thực hiện nhiệm vụ học tập - HS quan sát hình ảnh, lắng nghe GV giới thiệu kiến thức. - HS đọc nội dung thông tin mục 1, suy nghĩ và trả lời câu hỏi. - GV hướng dẫn, hỗ trợ HS (nếu cần thiết). Bước 3: Báo cáo kết quả hoạt động và thảo luận - GV mời đại diện HS trình bày kết quả. - GV mời HS khác nhận xét, bổ sung. Bước 4: Đánh giá kết quả thực hiện nhiệm vụ học tập - GV đánh giá, nhận xét, chuẩn kiến thức, chuyển sang nội dung mới. |
1. Xác định tín hiệu của mắt trong cảm biến dò đường - Cấu trúc lệnh nhận giá trị tín hiệu của mắt trong cảm biến dò đường hai mắt: Tín hiệu dò đường (mắt, cổng) - Tham số: + mắt = "trái", "phải" là vị trí mắt trái hay mắt phải của cảm biến. + cổng = vị trí cổng I/O kết nối cảm biến dò đường. - Ý nghĩa: Lệnh trả lại giá trị tín hiệu của mắt <mắt> (trái hoặc phải) trong cảm biến dò đường kết nối tại cổng <cổng>. Giá trị trả lại có ý nghĩa như sau: + 1 - mắt trên vùng đường sáng (vùng sáng). + 0 - mắt trên vùng đường tối (vùng tối). |
................................
................................
................................
Trên đây tóm tắt một số nội dung miễn phí trong bộ Kế hoạch bài dạy (KHBD) hay Giáo án Chuyên đề Tin học 10 mới nhất, để mua tài liệu đầy đủ, Thầy/Cô vui lòng xem thử:
Xem thêm các bài soạn Giáo án Chuyên đề Tin học lớp 10 Kết nối tri thức hay, chuẩn khác:
Giáo án Chuyên đề Tin học 10 Bài 9: Điều khiển robot chuyển động
Giáo án Chuyên đề Tin học 10 Bài 10: Điều khiển robot nhận biết vật cản
Giáo án Chuyên đề Tin học 10 Bài 12 Thực hành: Điều khiển robot trên sa bàn
Giáo án Chuyên đề Tin học 10 Bài 13: Lập trình điều khiển một số phu kiện
Giáo án Chuyên đề Tin học 10 Bài 14: Thực hành: Dự án điều khiển robot trên sa bàn
Để học tốt lớp 10 các môn học sách mới:
- Giải bài tập Lớp 10 Kết nối tri thức
- Giải bài tập Lớp 10 Chân trời sáng tạo
- Giải bài tập Lớp 10 Cánh diều
TÀI LIỆU CLC DÀNH CHO GIÁO VIÊN VÀ PHỤ HUYNH LỚP 10
+ Bộ giáo án, bài giảng powerpoint, đề thi file word có đáp án 2025 tại https://tailieugiaovien.com.vn/
+ Hỗ trợ zalo: VietJack Official
+ Tổng đài hỗ trợ đăng ký : 084 283 45 85
Đã có app VietJack trên điện thoại, giải bài tập SGK, SBT Soạn văn, Văn mẫu, Thi online, Bài giảng....miễn phí. Tải ngay ứng dụng trên Android và iOS.


Nếu thấy hay, hãy động viên và chia sẻ nhé! Các bình luận không phù hợp với nội quy bình luận trang web sẽ bị cấm bình luận vĩnh viễn.
Đã có app VietJack trên điện thoại, giải bài tập SGK, SBT Soạn văn, Văn mẫu, Thi online, Bài giảng....miễn phí. Tải ngay ứng dụng trên Android và iOS.
Loạt bài Giáo án Tin 10 chuẩn nhất của chúng tôi được biên soạn bám sát mẫu Kế hoạch bài dạy Tin học 10 chuẩn của Bộ GD & ĐT.
Nếu thấy hay, hãy động viên và chia sẻ nhé! Các bình luận không phù hợp với nội quy bình luận trang web sẽ bị cấm bình luận vĩnh viễn.
- Giáo án lớp 10 (các môn học)
- Giáo án điện tử lớp 10 (các môn học)
- Giáo án Ngữ văn 10
- Giáo án Toán 10
- Giáo án Tiếng Anh 10
- Giáo án Vật Lí 10
- Giáo án Hóa học 10
- Giáo án Sinh học 10
- Giáo án Lịch Sử 10
- Giáo án Địa Lí 10
- Giáo án Kinh tế Pháp luật 10
- Giáo án Tin học 10
- Giáo án Công nghệ 10
- Giáo án Giáo dục quốc phòng 10
- Giáo án Hoạt động trải nghiệm 10
- Đề thi lớp 10 (các môn học)
- Đề thi Ngữ Văn 10 (có đáp án)
- Chuyên đề Tiếng Việt lớp 10
- Đề cương ôn tập Văn 10
- Đề thi Toán 10 (có đáp án)
- Đề thi cương ôn tập Toán 10
- Đề thi Toán 10 cấu trúc mới (có đáp án)
- Đề thi Tiếng Anh 10 (có đáp án)
- Đề thi Vật Lí 10 (có đáp án)
- Đề thi Hóa học 10 (có đáp án)
- Đề thi Sinh học 10 (có đáp án)
- Đề thi Lịch Sử 10 (có đáp án)
- Đề thi Địa Lí 10 (có đáp án)
- Đề thi Kinh tế & Pháp luật 10 (có đáp án)
- Đề thi Tin học 10 (có đáp án)
- Đề thi Công nghệ 10 (có đáp án)
- Đề thi Giáo dục quốc phòng 10 (có đáp án)

 Giải bài tập SGK & SBT
Giải bài tập SGK & SBT
 Tài liệu giáo viên
Tài liệu giáo viên
 Sách
Sách
 Khóa học
Khóa học
 Thi online
Thi online
 Hỏi đáp
Hỏi đáp